在 Python 中使用 OpenCV 的卡尔曼滤波器

计算机视觉处理与人工智能中的图像和视频处理相关的各种复杂任务。我们使用 Python 的 opencv 库来处理其中一些任务。
这个库使用对象来实现不同的算法和技术来解决其中一些问题。
其中一项任务是预测给定物体的轨迹。用于此的最常用算法之一是卡尔曼滤波器。
本教程将演示在 Python 中使用 opencv 的卡尔曼滤波器。
在 Python 中使用 opencv 的卡尔曼滤波器
卡尔曼滤波器使用对象的先前状态来预测其下一个状态。该算法使用线性随机差分方程来确定下一个状态。
我们需要熟悉与这个方程相关的一些矩阵。
首先,状态转移矩阵将当前状态与前一个状态联系起来。或者,我们可以使用控制输入矩阵来控制输入。
我们需要将状态转换为使用转换矩阵实现的某个测量域。还需要一个具有协方差的过程噪声向量。
在 Python 中,我们可以使用 opencv 库中的 KalmanFilter 类来实现该算法并预测状态。我们将为此类定义对象的属性并分配必要的矩阵。
measurementMatrix、transitionMatrix 和 processNoiseCov 属性分别指定了前面讨论的测量矩阵、转换矩阵和具有协方差的过程噪声矩阵。然后我们可以使用该对象使用 predict() 函数进行一些预测。
让我们通过一个例子更好地理解这一点。
import cv2
import numpy as np
measured = []
predicted = []
dr_frame = np.zeros((400, 400, 3), np.uint8)
mp = np.array((2, 1), np.float32)
tp = np.zeros((2, 1), np.float32)
def on_mouse(k, x, y, s, p):
global mp, measured
mp = np.array([[np.float32(x)], [np.float32(y)]])
measured.append((x, y))
def paint_canvas():
global dr_frame, measured, predicted
for i in range(len(measured) - 1):
cv2.line(dr_frame, measured[i], measured[i + 1], (0, 100, 0))
for i in range(len(predicted) - 1):
cv2.line(dr_frame, predicted[i], predicted[i + 1], (0, 0, 200))
def reset_canvas():
global measured, predicted, dr_frame
measured = []
predicted = []
dr_frame = np.zeros((400, 400, 3), np.uint8)
cv2.namedWindow("Sample")
cv2.setMouseCallback("Sample", on_mouse)
kalman_fil = cv2.KalmanFilter(4, 2)
kalman_fil.measurementMatrix = np.array([[1, 0, 0, 0], [0, 1, 0, 0]], np.float32)
kalman_fil.transitionMatrix = np.array(
[[1, 0, 1, 0], [0, 1, 0, 1], [0, 0, 1, 0], [0, 0, 0, 1]], np.float32
)
kalman_fil.processNoiseCov = (
np.array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1]], np.float32)
* 0.03
)
while True:
kalman_fil.correct(mp)
tp = kalman_fil.predict()
predicted.append((int(tp[0]), int(tp[1])))
paint_canvas()
cv2.imshow("Output", dr_frame)
k = cv2.waitKey(30) & 0xFF
if k == 27:
break
if k == 32:
reset_canvas()
输出:
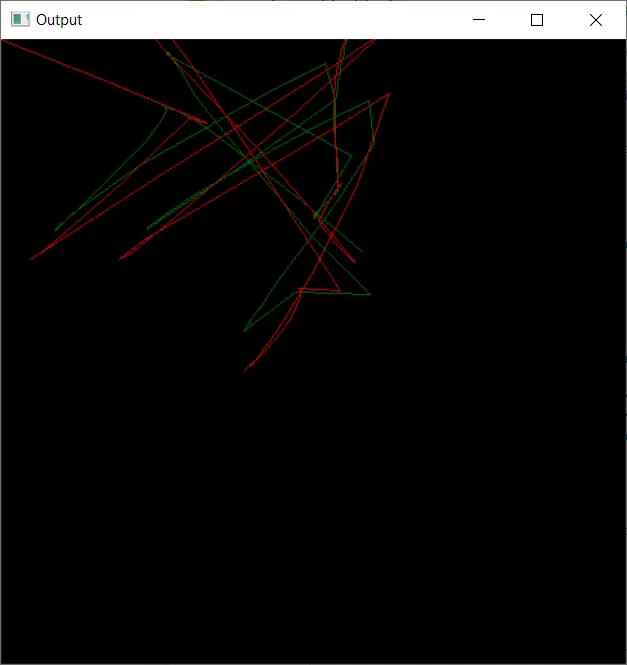
在上面的示例中,我们实现了卡尔曼滤波器并使用它来预测我们的鼠标移动。我们创建一个画布并在该画布上移动光标(绿色),同时卡尔曼滤波器将尝试预测光标移动(红色)。
让我们了解代码中发生了什么。
我们首先创建一个画布框架,我们可以在其上绘制光标移动。on_mouse() 函数用于附加光标的值。
paint_canvas() 方法获取这些值和预测值并将它们绘制在画布上。每当移动光标时,也会调用 setMouseCallback() 函数。
我们创建了一个名为 kalman_fil 对象的 KalmanFilter 类。使用前面讨论的属性分配了所需的矩阵。
然后我们运行一个循环在画布上绘制并进行预测。
此类的 correct() 方法会根据测量结果更新预测状态。predict() 函数进行预测。
这些预测值被赋予 paint_canvas() 方法。
为了跳出循环,我们使用 break 语句,当用户按下 Esc 键(键盘上的键号 27)时调用它。如果我们按下空格键,画布会通过调用 reset_canvas() 方法清除先前的测量值。
结论
最后,我们在本教程中讨论了卡尔曼滤波器的基础知识。我们讨论了它背后的必要逻辑和属性。
我们使用 opencv 库中的 KalmanFilter 类实现了这个算法。演示了该类的不同参数和成员函数。
我们使用该算法来预测光标在绘图画布上的移动。
Manav is a IT Professional who has a lot of experience as a core developer in many live projects. He is an avid learner who enjoys learning new things and sharing his findings whenever possible.
LinkedIn