Insertion itérative de l'arbre binaire de recherche
- Algorithme d’insertion itérative dans la BST
- Illustration de l’insertion itérative de BST
- Implémentation de l’insertion itérative dans une BST
- Complexité de l’algorithme d’insertion itérative de la BST
Dans l’article précédent [arbre binaire de recherche](/fr/tutorial/data-structure/binary-search-tree/, nous avons discuté de l’approche récursive pour insérer un nœud dans BST. Dans cet article, nous discuterons de l’approche itérative pour insérer un noeud dans BST. Elle est meilleure que la méthode récursive car l’algorithme d’insertion itérative ne nécessite pas d’espace supplémentaire.
Algorithme d’insertion itérative dans la BST
Soit root le nœud racine de BST et key l’élément que nous voulons insérer.
-
Créez le nœud à insérer -
toinsert. -
Initialisez deux pointeurs,
currpointant surrootetprevpointant sur null. (currtraverse l’arbre etprevmaintient sa trace). -
Si
curr!=NULL, faites ce qui suit :- Mettez à jour
prevpour qu’il soitcurrpour maintenir sa trace. - si
curr->data>key, mettezcurràcurr->left, supprimez le sous-arbre de droite. - si
curr->data<key, mettrecurràcurr->right, supprimer le sous-arbre de gauche.
- Mettez à jour
-
Si
prev==NULL, cela signifie que l’arbre est vide. Créez le noeudroot. -
Sinon, si
prev->data>keyalors inséreztoinsertà gauche deprev,prev->left=toinsert. -
Sinon, si
prev->data<keyalors inséreztoinsertà droite deprev,prev->right=toinsert.
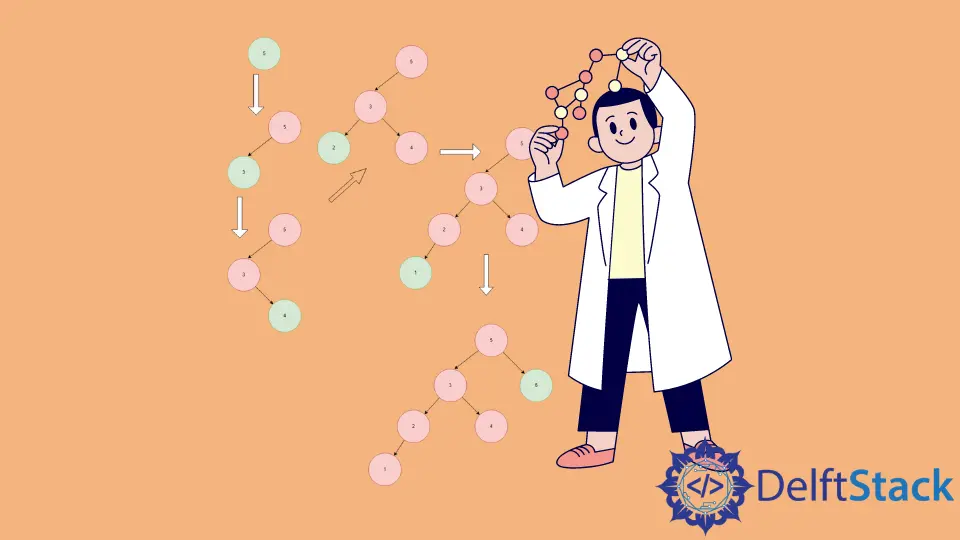
Illustration de l’insertion itérative de BST

-
Tout d’abord, nous initialisons la BST en créant un nœud
rootet en y insérant5. -
3est plus petit que5, donc il est inséré à gauche de5. -
4est plus petit que5mais plus grand que3, donc il est inséré à droite de3mais à gauche de4. -
2est le plus petit élément de l’arbre courant, il est donc inséré à la position la plus à gauche. -
1est le plus petit élément dans l’arbre courant, il est donc inséré à la position la plus à gauche. -
6est le plus grand élément de l’arbre courant, il est donc inséré à la position la plus à droite.
C’est ainsi que nous insérons des éléments dans un BST.
Implémentation de l’insertion itérative dans une BST
#include <iostream>
using namespace std;
class Node {
public:
int key;
Node *left, *right;
};
Node *newNode(int item) {
Node *temp = new Node;
temp->key = item;
temp->left = temp->right = NULL;
return temp;
}
void inorder(Node *root) {
if (root != NULL) {
inorder(root->left);
cout << root->key << " ";
inorder(root->right);
}
}
void insert(Node *&root, int key) {
Node *toinsert = newNode(key);
Node *curr = root;
Node *prev = NULL;
while (curr != NULL) {
prev = curr;
if (key < curr->key)
curr = curr->left;
else
curr = curr->right;
}
if (prev == NULL) {
prev = toinsert;
root = prev;
}
else if (key < prev->key)
prev->left = toinsert;
else
prev->right = toinsert;
}
int main() {
Node *root = NULL;
insert(root, 5);
insert(root, 3);
insert(root, 8);
insert(root, 6);
insert(root, 4);
insert(root, 2);
insert(root, 1);
insert(root, 7);
inorder(root);
}
Complexité de l’algorithme d’insertion itérative de la BST
Complexité du temps
- Cas moyen
En moyenne, la complexité temporelle de l’insertion d’un nœud dans une BST est de l’ordre de la hauteur de l’arbre binaire de recherche. En moyenne, la hauteur d’une BST est de O(logn). Elle se produit lorsque la BST formée est une BST équilibrée. Par conséquent, la complexité temporelle est de l’ordre de [Big Theta] : O(logn).
- Meilleur cas
Le meilleur cas se produit lorsque l’arbre est une BST équilibrée. Dans le meilleur des cas, la complexité temporelle de l’insertion est de l’ordre de O(logn). C’est la même chose que la complexité temporelle dans le cas moyen.
- Pire cas
Dans le pire des cas, nous pourrions avoir à traverser de la racine au nœud le plus profond de la feuille, c’est-à-dire toute la hauteur h de l’arbre. Si l’arbre est déséquilibré, c’est-à-dire s’il est de travers, la hauteur de l’arbre peut devenir n, et donc la complexité temporelle dans le pire des cas, tant pour l’insertion que pour la recherche, est O(n).
Complexité spatiale
La complexité spatiale de l’opération itérative d’insertion est de O(1) car aucun espace supplémentaire n’est nécessaire.

Harshit Jindal has done his Bachelors in Computer Science Engineering(2021) from DTU. He has always been a problem solver and now turned that into his profession. Currently working at M365 Cloud Security team(Torus) on Cloud Security Services and Datacenter Buildout Automation.
LinkedInArticle connexe - Data Structure
- Arbre binaire de recherche
- Convertir l'arbre binaire en arbre binaire de recherche
- Successeur de l'arbre de recherche binaire
- Suppression de l'arbre binaire de recherche
- Traversée de l'arbre binaire
Article connexe - Binary Tree
- Arbre binaire de recherche
- Convertir l'arbre binaire en arbre binaire de recherche
- Successeur de l'arbre de recherche binaire
- Suppression de l'arbre binaire de recherche
- Traversée de l'arbre binaire